Robot guidé par la vision taille les plants de tomates avec la Chameleon3
Le retrait des feuilles des plants de tomates est une procédure relativement simple qui consistait traditionnellement à couper manuellement les feuilles les plus vielles de la partie inférieure des tiges. Le processus est effectué chaque semaine sur des plants de tomates cultivés commercialement pour favoriser la maturation des tomates. Cependant, l'imprévisibilité et le coût élevé du travail manuel impliqué dans le processus et la recherche d'une main-d'œuvre motivée pour cette tâche monotone ont récemment conduit un consortium de producteurs de tomates aux Pays-Bas à s'associer aux spécialistes de l'automatisation de chez Priva. L'aboutissement de leurs efforts a donné lieu au développement et à l'optimisation d'un robot qui fournit aux producteurs de tomates une alternative économiquement viable à l'effeuillage manuel des plants de tomates cultivées en serre.
Selon le Dr. Tomas de Boer, ingénieur en conception mécatronique au sein de l'équipe de développement de Priva responsable de la conception du système, le robot Kompano Deleaf-Line se déplace sur des rails tubulaires présents dans la serre, les plants de tomates étant espacés de part et d'autre le long de ces rails (Figure 1). Le robot, équipé d'un système de vision et d'un cutter télescopique, se déplace d'une plante à l'autre de manière séquentielle, identifiant puis retirant les feuilles de chacun.

Figure 1 : Le robot Kompano Deleaf-Line se déplace sur des rails tubulaires présents dans la serre, les plants de tomates étant espacés de part et d'autre le long des rails Le robot, équipé d'un système de vision et d'un cutter télescopique, se déplace d'une plante à l'autre de manière séquentielle, identifiant puis retirant les feuilles de chacun d'entre eux.
Défis de conception
Dans le développement du système, les ingénieurs de Priva devaient s'assurer que le système robotique basé sur la vision pouvait fonctionner continuellement de jour comme de nuit dans les conditions environnementales difficiles rencontrées dans les serres commerciales. Le système devait donc être capable d'identifier les petits pétioles à feuilles vertes - ou les tiges qui attachent des limbes de tomates à leurs tiges - dans une mer d'autres feuilles vertes et opérer dans des conditions d'éclairage variées allant du soleil ou de la lumière artificielle à l'absence totale de lumière pendant la nuit.
Pour résoudre ces problèmes, les développeurs ont choisi de construire le système de vision autour d’une paire de caméras stéréoscopiques montées sur une plateforme mobile et d’un bras de coupe télescopique. Les caméras stéréo - qui ont chacune été construites à partir de deux paires de caméras Chameleon3 avec des capteurs Python à résolution OnSemi 1280 x 1024 - capturent un large champ de vision du côté gauche et droit de chaque plant de tomate. (Figure 2).
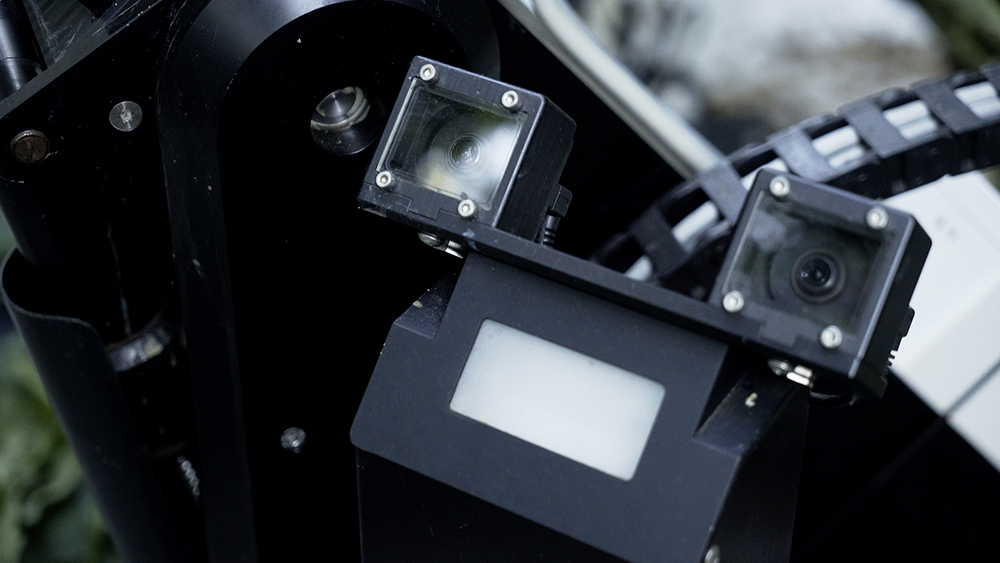
Figure 2 : Le système de vision du robot utilise une paire de caméras stéréoscopiques montées sur une plateforme mobile avec un bras de coupe télescopique. Les caméras stéréo - qui étaient chacune personnalisées à partir de deux paires de caméras Chameleon 3 avec des capteurs Python à résolution OnSemi 1280 x 1024 - capturent un large champ de vision du côté gauche et du côté droit de chacune des plants de tomates.
« Pour permettre à chaque paire de caméras stéréo de capturer des images fiables des plants de tomates, quelles que soient les conditions d'éclairage dans la serre, le système utilise une lumière stroboscopique au xénon qui illumine la plante. Tandis que le flash émet de la lumière toutes les deux secondes, il déclenche les caméras stéréo pour exposer les images à intervalles de 30 microsecondes. Cela permet au système de capturer un ensemble uniforme d’images à chaque fois », a déclaré le Dr de Boer.
Une fois que les deux caméras stéréo ont capturé une paire d’images, elles sont transférées via une interface USB vers un PC exécutant le système d’exploitation open source Ubuntu et le système d’exploitation robotique ROS, une infrastructure logicielle open source hébergée par Open Source Robotics. Foundation, Inc. (OSRF) pour créer des applications robotiques sur diverses plateformes.
Logiciel système
Les fonctions de traitement d'image sur mesure d'OpenCV sont ensuite utilisées pour traiter les images provenant des deux ensembles de caméras afin d'identifier l'emplacement des feuilles dans les plants de tomates dans une certaine gamme de hauteur préalablement définie par les producteurs de tomates. Après avoir identifié l'emplacement des feuilles, le logiciel de traitement d'image calcule ensuite les coordonnées tridimensionnelles exactes de leurs pétioles, qui doivent être coupées par l'effecteur à l'extrémité du bras robotisé.
Les données de coordonnées générées par le logiciel de traitement d'image sont transmises au système d'exploitation robotique (ROS), qui transfère les données vers un ensemble de servomoteurs intelligents alimentant les moteurs qui entraînent le bras robotique télescopique au bon emplacement sur le plant. Une fois arrivé à destination, l'effecteur coupe les pétioles, retirant les feuilles du plant de tomate. (Figure 3).
Comme la paire de caméras stéréo est montée sur la même plateforme que le bras robotique, á mesure que le bras se déplace pour couper un ensemble spécifique de pétioles, les caméras sont également déplacées vers un nouvel emplacement, où elles capturent une autre série d'images de la plante sous un angle différent.
« Ces nouvelles images sont traitées en parallèle lors de l’opération de découpe afin d’identifier toutes les autres feuilles devant être retirées de la plante lors d'une opération ultérieure. La procédure répétitive se poursuit jusqu'à ce que le système ne puisse plus détecter d'autres feuilles devant être retirées de la plante. Après avoir effectué une dernière vérification, l’opération de coupe s’arrête et le robot se déplace le long des voies jusqu’à la prochaine plante de la serre », a déclaré le Dr de Boer.

Figure 3 : Une fois que le logiciel de traitement de l'image a déterminé l'emplacement des pétioles sur le plant de tomate, les données sont utilisées pour amener le bras robotique télescopique du robot au bon endroit. Une fois qu'il a atteint sa destination, l'effecteur coupe alors les pétioles pour retirer les feuilles.
Touches de finition
À l'heure actuelle, les développeurs du robot Kompano Deleaf-Line travaillent avec des membres du consortium de culture de tomates aux Pays-Bas pour finaliser un prototype de pré-production du système.
Les membres qui ont travaillé avec Priva seront les premiers à pouvoir bénéficier du système lorsqu'il sera finalement disponible au début de l'année prochaine. Selon le nombre de robots commandés par le consortium, il sera alors disponible pour les autres producteurs de tomates à partir de juin 2017. À compter du mois de juin de cette année, il est également possible de pré-commander le robot en ligne.
À l'usage, le robot d'élagage devrait être capable de maintenir 0,75 à 1 hectare de plants de tomates, en fonction de la densité des feuilles sur leurs tiges. Dans les grandes installations, les producteurs peuvent choisir de travailler avec plusieurs robots ou de combiner le système automatisé avec le travail manuel.
Selon le Dr de Boer, ce robot sera le premier de nombreux robots que l’entreprise envisage de développer pour le marché horticole. Ces systèmes de nouvelle génération automatiseront d’autres tâches à forte intensité de main-d’œuvre, telles que la récolte de légumes comme les concombres.
À propos de Priva Group
Priva crée un climat propice à la croissance. L'entreprise est leader dans le développement et la production de technologies pour l'optimisation des conditions environnementales et la gestion des processus. Priva fournit des solutions pour l'horticulture, l'automatisation des bâtiments et beaucoup plus encore en proposant une combinaison unique de logiciels, de matériel et de services.
www.privagroup.com